Brief 舵轮底盘即使用舵轮作为底盘动力轮的底盘。这种轮子由只控制轮子方向的舵向电机和提供动力的动力轮电机控制。实际中我们是使用一个GM6020作为舵向电机,一个3508作为动力轮电机来控制一个舵轮。舵轮底盘有全舵轮底盘和半舵轮底盘的区别。对于不同兵种,其底盘功率限制的规则各不相同。例如,底盘功率更大的哨兵就可以选用全舵轮底盘,而底盘功率较小的英雄和步兵可能需要选用半舵轮底盘。对于底盘在平地上运动的情况,全舵轮和半舵轮的运动学解算并无区别。
理论计算 底盘运动学逆解算 已知底盘目标平动速度
为什么6020目标角度和3508目标速度有多种取值? 最小角优化。
什么是atan2?
另外作一个说明,此处
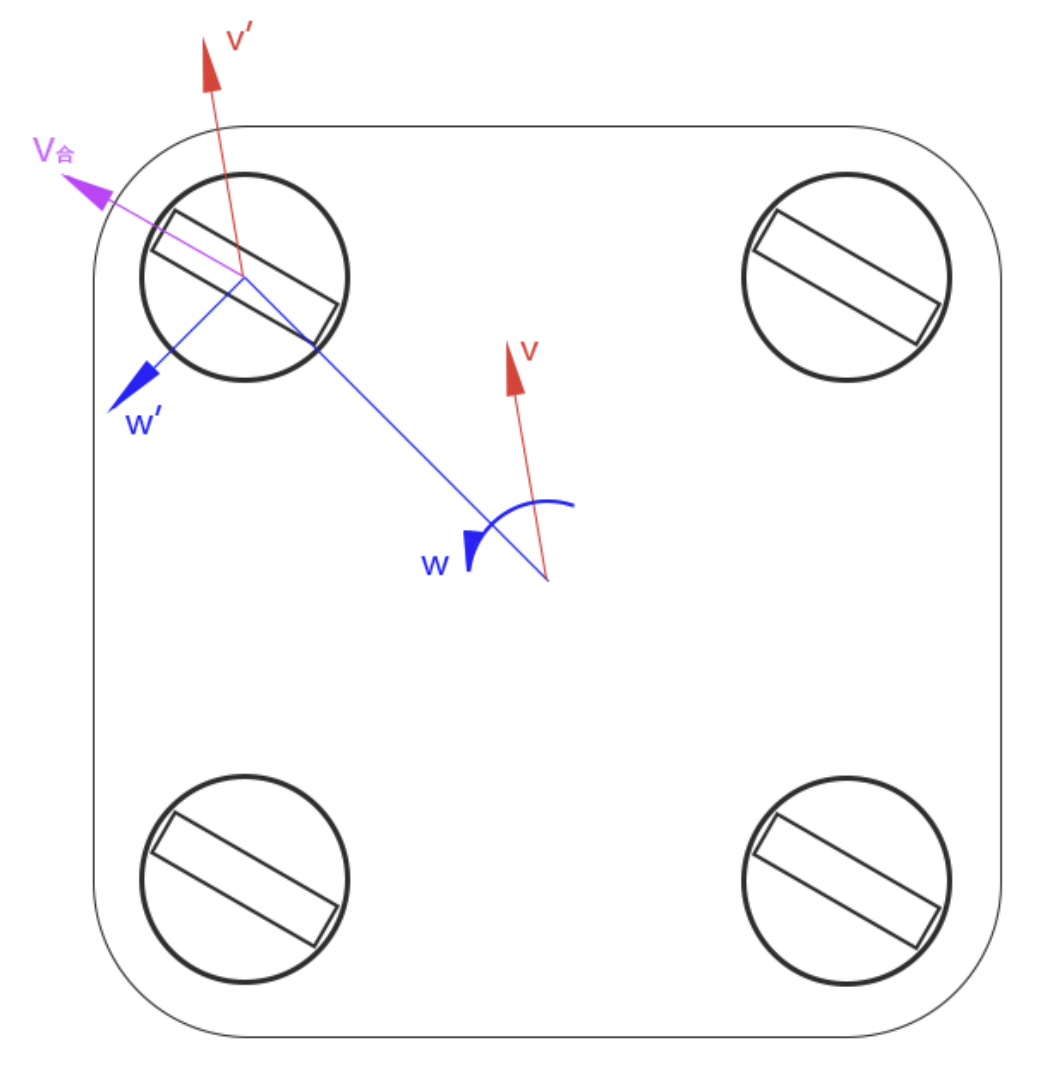
“最小角”优化 不难发现,当舵轮的方向和速度从当前角度转到目标角度所需转过的角度(以电机正向转动方向为正)为舵向轮的偏差角度
当 取 值 当 取 值 余弦优化 通常情况下,动力轮的响应速度会比舵向轮更快,这会造成舵向轮在旋转时动力轮已经达到了目标速度。理论上 ,这会造成在垂直于目标速度的方向上有速度,造成一段不期望出现的位移。
代码实现
警告
舵轮功能实现 我将一个舵轮视作一个对象Motor_Node。这个对象包含一个3508对象,一个6020对象,以及控制两个电机的PID和它们的目标值和输出值
1 2 3 4 5 6 7 8 9 typedef struct {int16_t spin_speed; int16_t angle; int16_t out_3508; int16_t out_6020;
当舵轮收到运动学解算的结果时,会根据最小角优化的算法得到两个电机实际的目标角度/目标速度。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 void Motor_Node_FillData (Motor_Node* node) ;float error_angle (float target, float current) {float error;180 ? error - 360 : error;-180 ? error + 360 : error;return error;void Motor_Node_Calc (Motor_Node* node, int16_t speed, int16_t angle) {float err;if ( ABS(err) > 90 ){180 ? angle - 180 : angle + 180 ;int16_t M6020_speed = BasePID_Calc(&node->PID_6020_angle,0 ,err);void Motor_Node_FillData (Motor_Node* node) {
底盘功能实现 全舵轮底盘有4个舵轮,因此定义4个舵轮对象作为全舵轮底盘。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 void Chassis_Calc (float vx, float vy, float w) {float x[4 ],y[4 ];0 ] = vx + w * 0.7071f ; y[0 ] = -vy + w * 0.7071f ;1 ] = -vx + w * 0.7071f ; y[1 ] = vy - w * 0.7071f ;2 ] = -vx + w * 0.7071f ; y[2 ] = vy + w * 0.7071f ;3 ] = vx + w * 0.7071f ; y[3 ] = -vy - w * 0.7071f ;for (int i = 0 ; i < 4 ; i++){float spin_speed = Sqrt( x[i] * x[i] + y[i] * y[i] );float angle;if ( x[i] == 0 && y[i] == 0 ){else {57.29578f ;
如果你自己做过一次运动学解算,你或许会发现你算出的结果和我的代码是对不上的:
1 2 3 4 x[0 ] = vx + w * 0.7071f ; y[0 ] = -vy + w * 0.7071f ;1 ] = -vx + w * 0.7071f ; y[1 ] = vy - w * 0.7071f ;2 ] = -vx + w * 0.7071f ; y[2 ] = vy + w * 0.7071f ;3 ] = vx + w * 0.7071f ; y[3 ] = -vy - w * 0.7071f ;
这确实是一个令人费解的情况。导致这种情况的原因可能 是舵轮的坐标系和底盘的坐标系不同 可能 各不相同,甚至不同的电控同学会实现出不同的初始化可能 是出现这种情况的原因
我的解决办法是,架起舵轮底盘,使其离地,调整解算结果中的符号,并观察结果是否符合现实需求
—END—
引用:C 库函数 - atan2() ,菜鸟教程